Sisteme de ecuatii liniare
Haideti sa vedem un exemplu de sistem de ecuatii liniare pentru a intelege mai bine despre ce o sa vorbim in acest curs.
Exemplu:
O companie produce produsele N1, N2, ..., Nn pentru care ne trebuie resursele R1, R2, ..., Rm. Pentru a produce o unitate Nj avem nevoie de ai j unitati de resurse ai unde i= 1, 2, ..., m si j= 1, 2, ... n.
Obiectivul este sa gasim un plan de producere optim. Acest plan o sa ne spuna cate unitati xj de produse Nj ar trebui sa fie facute daca avem disponibile bi de unitati de resurse Ri.
Daca producem x1, ..., xn de unitati de produse avem nevoie de un total de: ai1x1 + ... + ainxn resurse de Ri.
Un plan optim trebuie sa satisfaca urmatorul sistem de ecuatii:
a11x1 + ... + a1nxn = b1
.
.
.
am1x1 + · · · + amnxn = bm
Aceasta este forma generala a unui sistem de linear ecuatii si x1, ..., xn sunt necunoscutele sistemului.
Haideti sa mai vedem cateva exemple de sisteme.
Acest sistem de ecuatii
x1 + x2 + x3 = 3 (1)
x1 − x2 + 2x3 = 2 (2)
2x1 + 3x3 = 1 (3)
nu are solutii. Daca adunam primele doua ecuatii o sa ne dea ca 2x1 + 3x3 = 5 ceea ce contrazice relatia cu numarul 3.
Haideti sa mai vedem un alt sistem.
x1 + x2 + x3 = 3 (1)
x1 − x2 + 2x3 = 2 (2)
x2 + x3 = 2 (3)
Din prima si a treia rezulta ca x1=1. Daca facem (1) + (2) ⇒ 2x1 + 3x3 = 5 ⇒ x3=1. DIn (3) ⇒ x2 = 1. Singura solutie este (1, 1, 1).
Ca un al treilea exemplu, luam sistemul
x1 + x2 + x3 = 3 (1)
x1 − x2 + 2x3 = 2 (2)
2x1 + 3x3 = 5 (3)
Pentru ca (1) + (2) = (3), putem sa excludem ecuatia (3). Din (1) si (2) o sa avem ca 2x1 = 5-3x3 si ca 2x2 = 1+x3. Definim x3 = a ∈ R ca o variabila libera. O sa avem solutiile (\( \frac{5}{2} - \frac{3}{2}a \), \( \frac{1}{2} + \frac{1}{2}a \), a). Acest set contine o infinitate de solutii.
Interpretarea geometrica a sistemelor de ecuatii liniare
Intr-un sistem de ecuatii liniare cu doua variabile x1, x2, fiecare ecuatie liniara defineste o dreapta in planul x1x2. Deoarece o solutie a unui sistem de ecuatii liniare trebuie sa satisfaca toate ecuatiile simultan, multimea solutiilor este intersectia acestor drepte. Aceasta multime de intersectie poate fi o linie (daca ecuatiile liniare descriu aceeasi dreapta), un punct sau vida (cand dreptele sunt paralele).
4x1 + 4x2 = 5
2x1 − 4x2 = 1
Asta putem sa vedem si in figura:
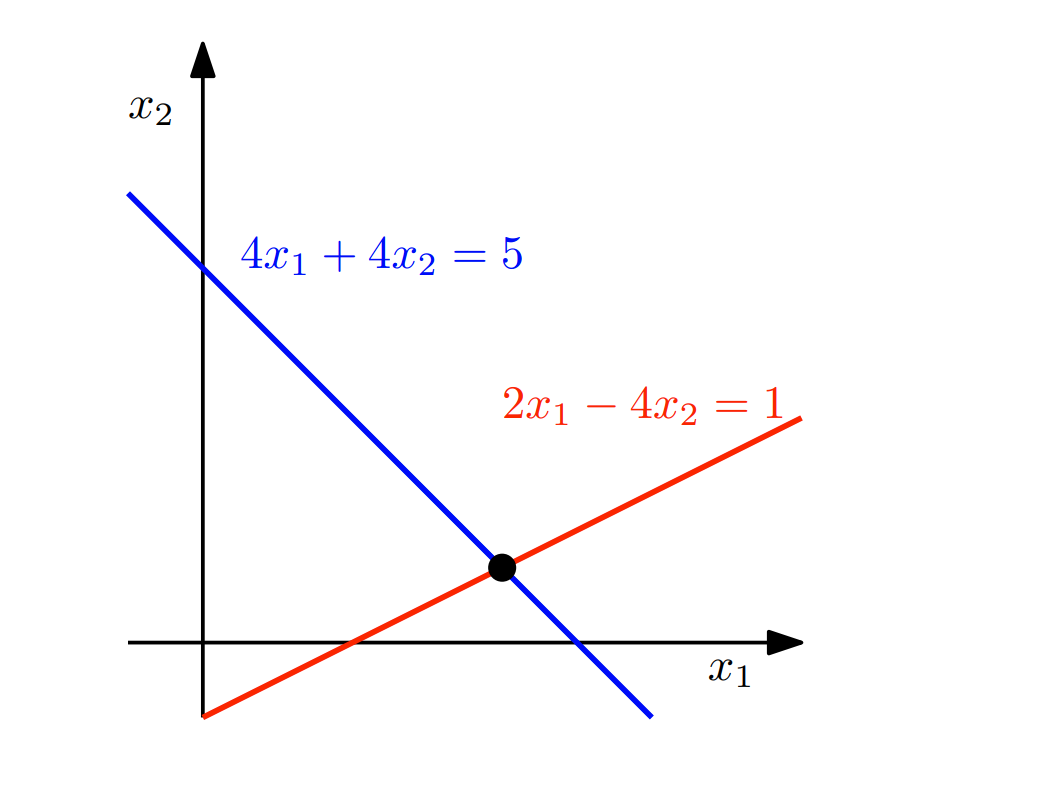
Unde spatiul solutiilor este punctul (x1, x2) = (1, \( \frac{1}{4} \)). In mod similar, pentru trei variabile, fiecare ecuatie liniara determina un plan in spatiul tridimensional. Cand intersectam aceste plane, adica satisfacem toate ecuatiile liniare in acelasi timp, putem obtine o multime de solutii care este un plan, o linie, un punct sau vida (cand planele nu au o intersectie comuna).
Pentru o abordare sistematica in rezolvarea sistemelor de ecuatii liniare, vom introduce o notatie compacta utila. Colectam coeficientii aij in vectori si colectam vectorii in matrici. Cu alte cuvinte, scriem sistemul general in urmatoarea forma:
$$ \begin{bmatrix} a_{11} \\ \vdots \\ a_{m1} \end{bmatrix} x_1 + \begin{bmatrix} a_{12} \\ \vdots \\ a_{m2} \end{bmatrix} x_2 + \cdots + \begin{bmatrix} a_{1n} \\ \vdots \\ a_{mn} \end{bmatrix} x_n = \begin{bmatrix} b_1 \\ \vdots \\ b_m \end{bmatrix} $$
$$ \iff \begin{bmatrix} a_{11} & \cdots & a_{1n} \\ \vdots & & \vdots \\ a_{m1} & \cdots & a_{mn} \end{bmatrix} \begin{bmatrix} x_1 \\ \vdots \\ x_n \end{bmatrix} = \begin{bmatrix} b_1 \\ \vdots \\ b_m \end{bmatrix} $$